 English
English
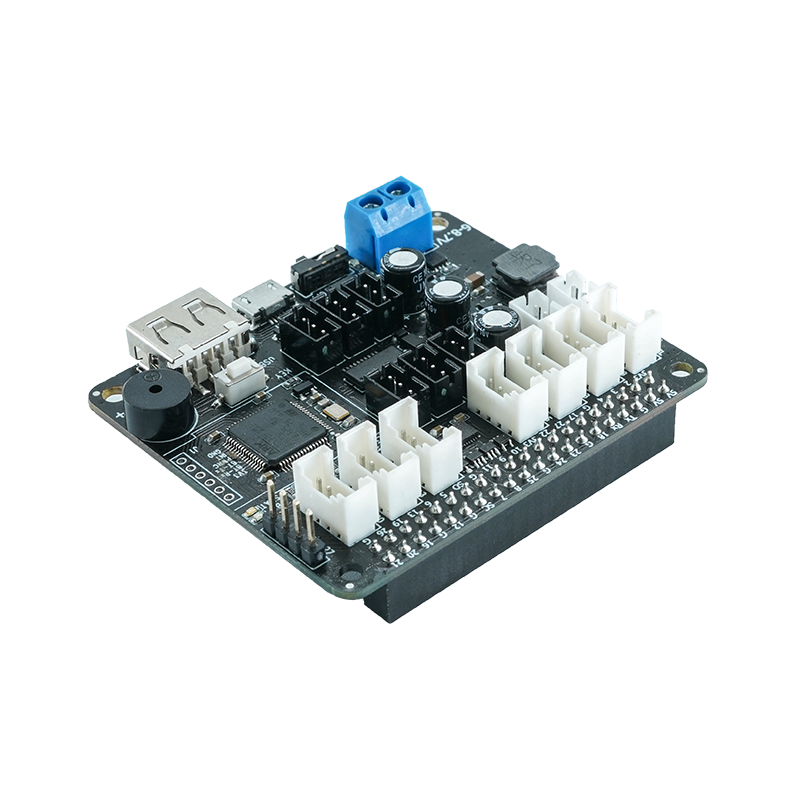
产品简介
Rasprobo1是分布式串行总线舵机的扩展板,专门为树莓派用户设计开发。它集成了舵机接口,IMU模块,补光模块和多种接口,为开发者带来极大的便利,可广泛应用于机器人以及其他各类STEAM教育产品。
功能特性
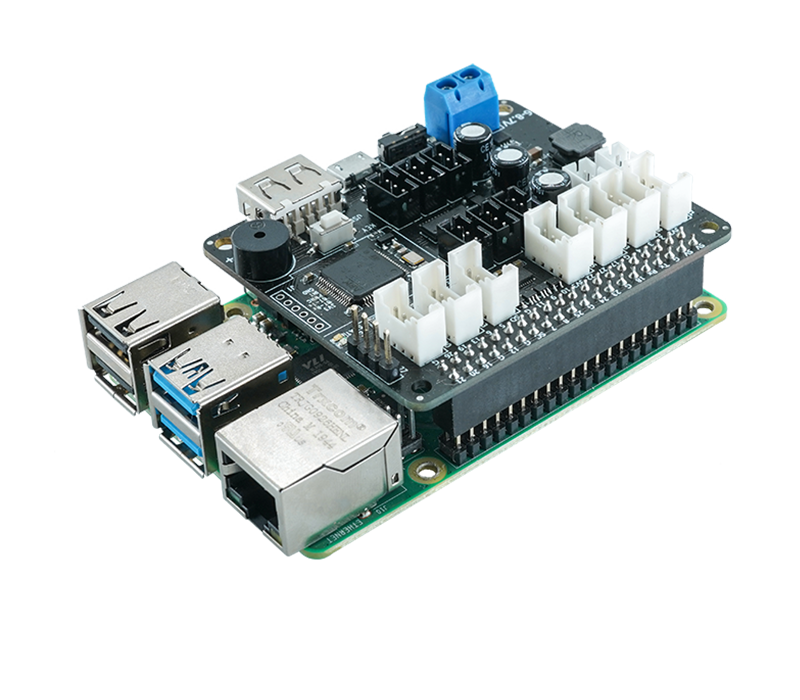
- 直接兼容树莓派,无需其他连线
- 集成6路分布式串行总线通道
- 可直接调用预先编辑好的动作组
- 集成惯性导航模块 (IMU), 支持机器人自平衡及高级姿态算法
- 集成电源管理,可直接给树莓派供电
- 集成摄像头补光灯控制
- 集成I2C | 数字 | 按键接口
- 支持低压报警
接口说明
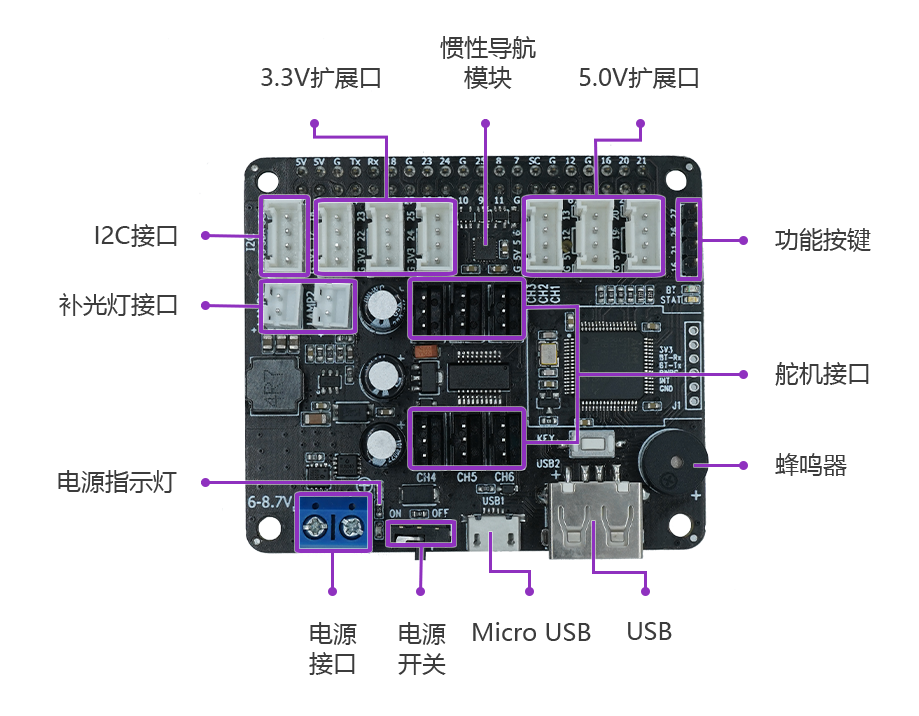
| 电源接口 | 6.0-8.4V |
| 电源开关 | 电源 ON/OFF |
| I2C 接口 | 树莓派功能引出接口,兼容 Grove 接口定义 |
| 5.0V扩展口 | |
| 3.3V扩展口 | |
| 补光灯接口 | 集成补光灯控制电路,用于摄像头补光 |
| 舵机接口 | CH1-CH6,连接分布式串行总线舵机 |
| 功能按键 | 扩展按键,可自定义功能 |
| 惯性导航模块 | IMU(ICM20948),支持机器人自平衡及高级姿态算法 |
| Micro USB | 连接PC进行动作编辑 |
| USB | 2.4G 手柄接收器接口 |
| 蜂鸣器 | 低压报警 |
| 电源指示灯 | 电源状态指示灯 |
| 电压正常-常亮;低电压-闪烁 |
