English
English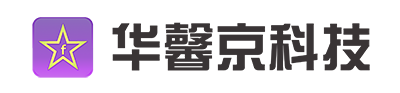
产品简介
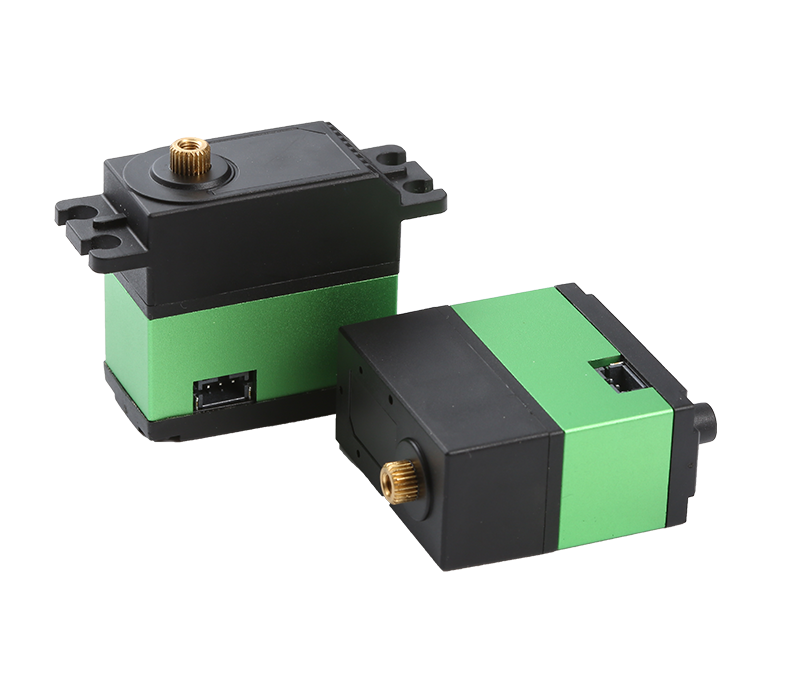
分布式串行总线平台 (简称DBSP) ,主要面向多关节的机器人产品,搭配位置回读的动作编辑器,让编程“零”基础的你,都可以轻松完成机器人的动作设计。
32位处理器
32位Cortex M3处理器,最多可存储1000组动作。
ID自动分配
系统自动扫描各个通道的舵机,并根据连线顺序依次分配ID。
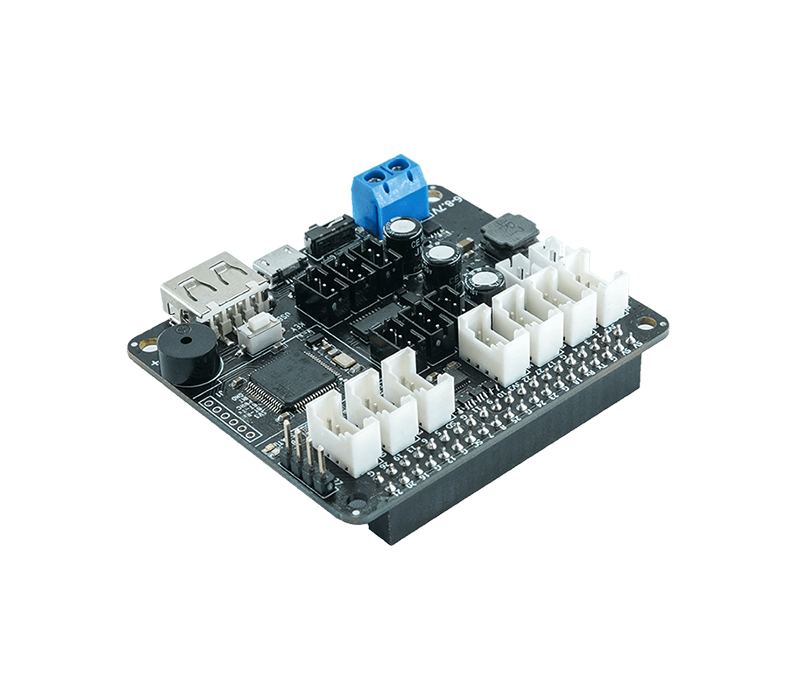
分布式串行总线
6路独立总线通道,分布式排列,优化布线和电源分配管理。
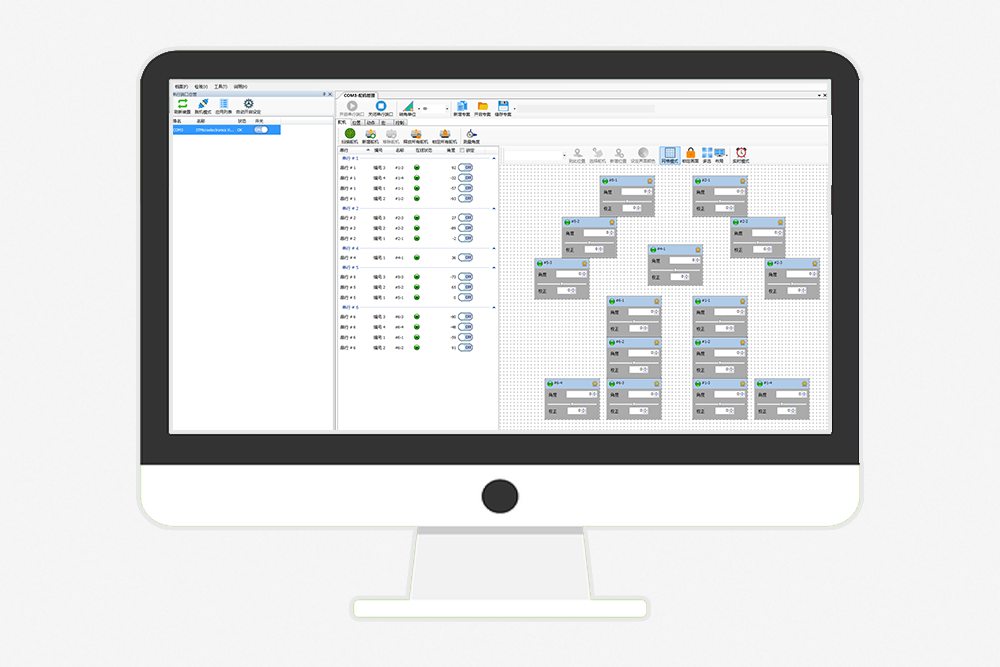
位置回读式动作编程
掰动关节–扫描舵机–设置执行时间,3步即可完成动作设计。
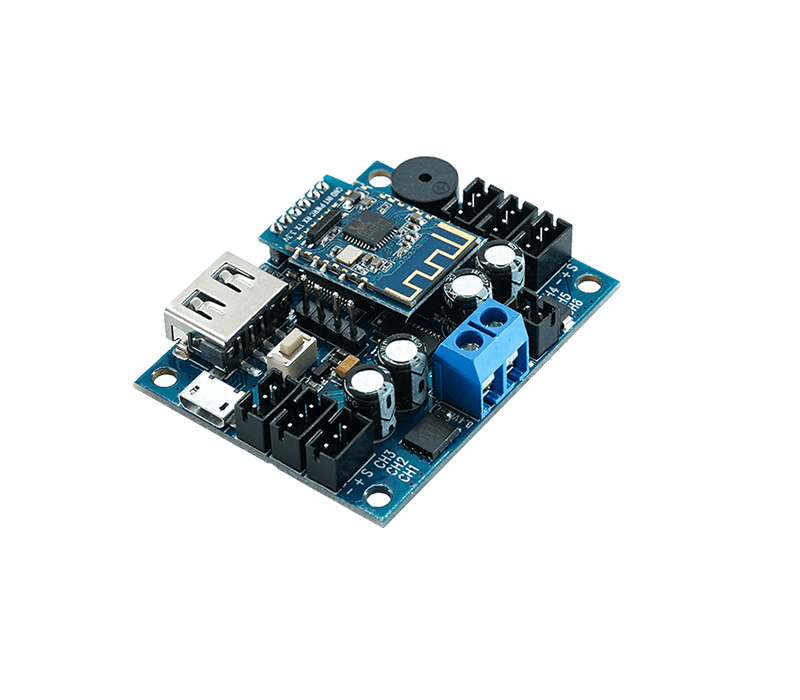
多平台开发
兼容多平台二次开发,支持树莓派/Arduino UNO专用扩展板。
Mixly积木编程
支持在Mixly编程环境中,直接调用动作组。
基本参数




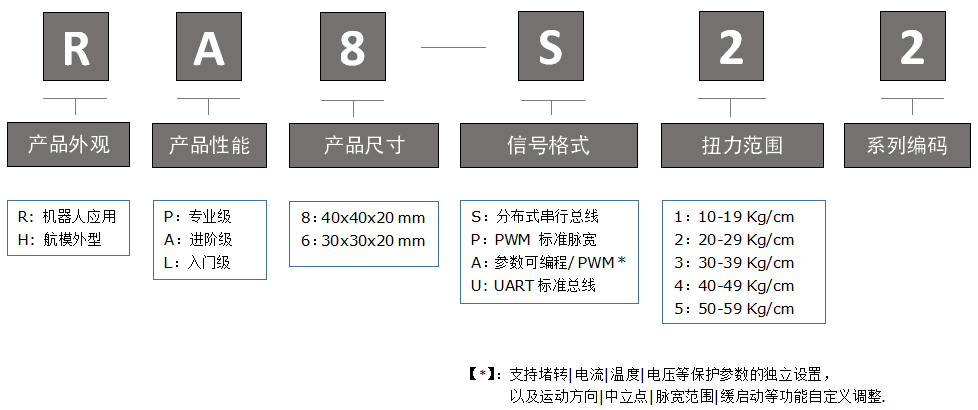
型号: RA8-S22 | HA8-S22
- 堵转扭矩: 25Kg-cm (7.4V)
- 空载速度: 0.15sec@60º (7.4V)
- 工作电压: 6.0-8.4V
- 全金属加厚齿轮
- 铁芯马达
- 有效角度: 180º
- 全对称双轴结构 (RA8系列)
- 传统单轴结构 (HA8系列)
控制协议
(专利号:ZL 2018 2 0115636.4)
系统支持6路总线通道,采用分布式排列方式,每条通道上的舵机以串行方式连接,舵机ID无需预先设置,全部由系统自动分配。极大提高了机器人的布线和电源分配的合理性。
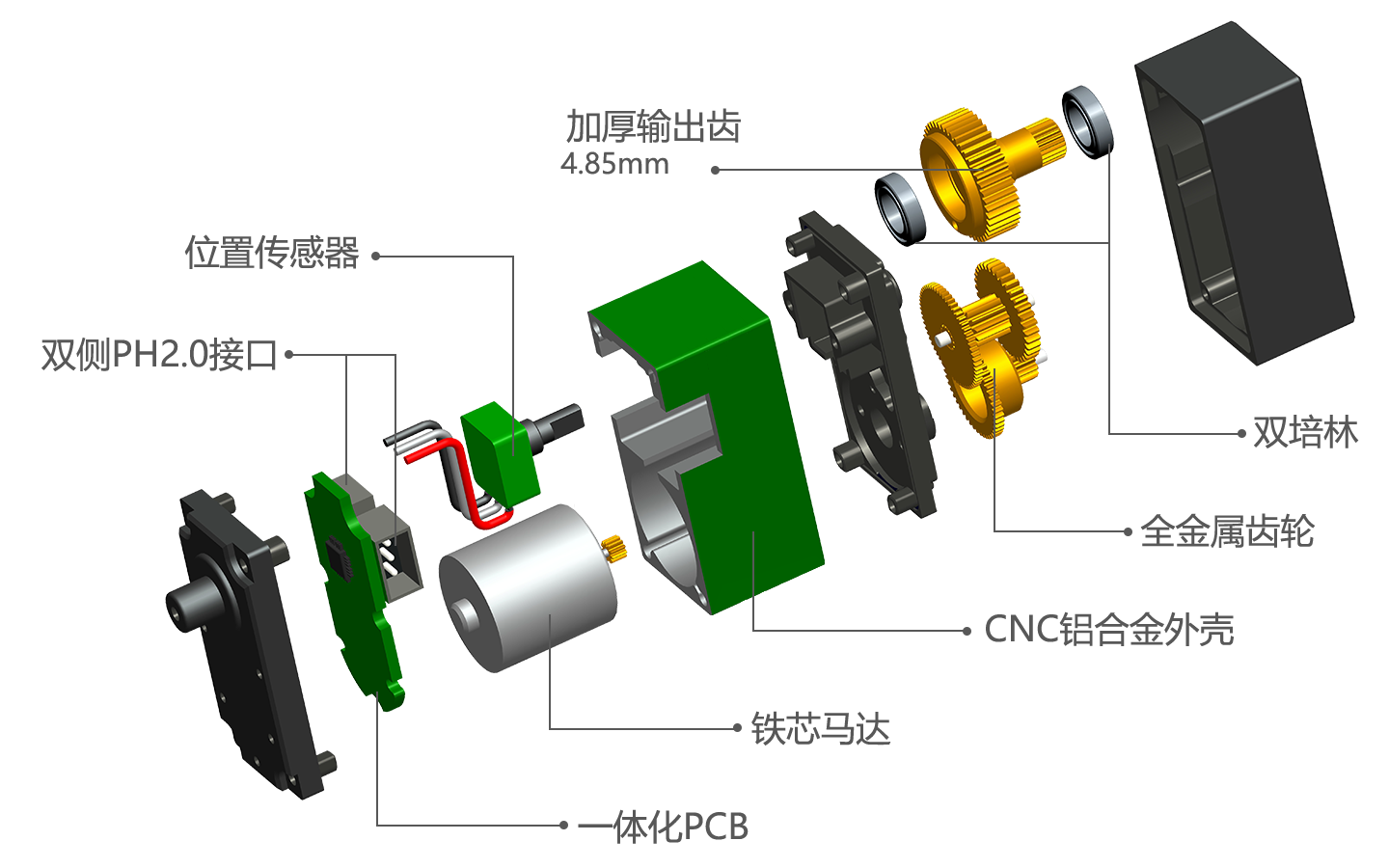
结构特性
从齿轮强度,到马达寿命,从传感器精度,到结构对称性,每一个细节都是我们追赶的高度。

Mixly积木式编程
- 兼容Mixly编程环境
- 提供DBSP库文件
- 可直接控制单个或多个舵机动作
- 可直接调用预先编辑好的动作组

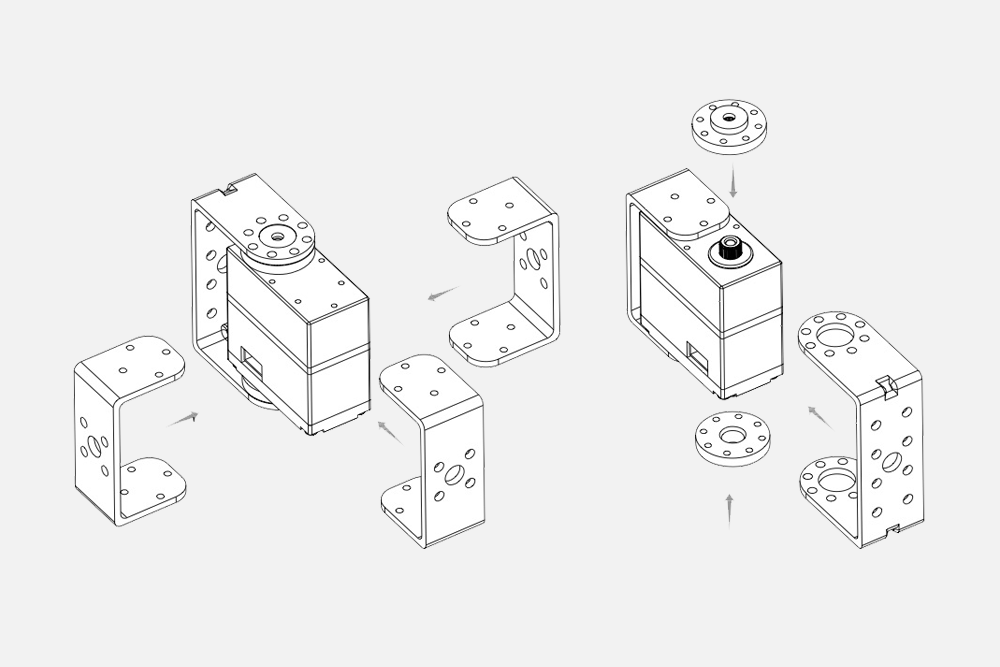
全对称机身孔位
- 双轴舵机系列,机身孔位采用全对称结构
- 支持从-90º, 0º和 90º三个方向安装支架
- 下沉式舵盘设计
- (各类支架需要另外订购)
配件清单
- 主舵盘 (25T) 1pcs
- 副舵盘 1pcs
- M3.0*6 2pcs
- M2.0*5 16pcs
- PB2.0*5 10pcs
- PH2.0-JR 数据线 (30cm) 1pcs

订购编号
RA8-S22| HA8-S22